
| EcanVCI动态库使用手册 | 点击下载 |
1接口函数库说明及其使用
1.1接口卡设备类型定义
各个接口卡的类型定义如表1.1所示。

表1.1接口卡的类型定义
1.2开发流程图
本开发流程适用于我司出品的 USBCAN 系列接口卡(USBCAN II FD 除外),请按照开发流程进行二次开发,流程如图1.1所示,开发代码示例如程序清单1.1所示。
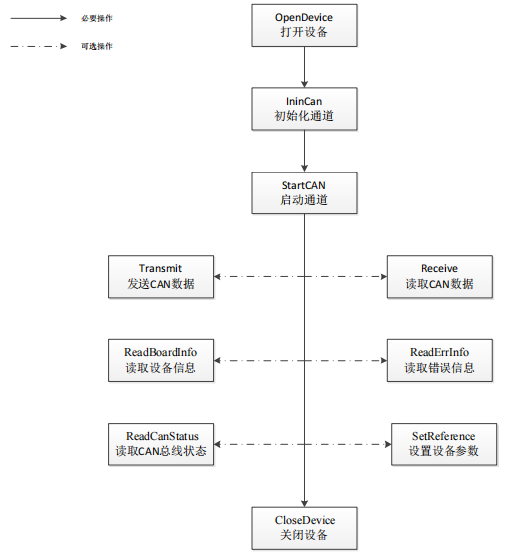
图 1.1 CAN 开发流程图
程序清单1.1开发代码示例
//接口卡类型定义 #define USBCAN1 3
#define USBCAN2 4
//函数调用返回状态值 #define STATUS_OK 1
#define STATUS_ERR 0
//通道号 #define CAN1 0
#define CAN2 1
bool m_connect=false;
/*设备启动标志符 false:表示设备未启动或者已经关闭 true:表示设备已经启动可以正常收发数据*/DWORD DeviceType = USBCAN2;
//设备类型 USBCAN2 双通道DWORD DeviceInd = 0;
//设备索引0,只有一个 USBCANif(OpenDevice(DeviceType, DeviceInd,0)!=STATUS_OK)
{
Std::cout<<”打开设备失败”<<std:endl;
return 0;
}
INIT_CONFIG init_config;
memset(&init_config,0,sizeof(init_config));
init_config.AccCode = 0;
init_config.AccMask =0xffffff;
//不滤波init_config.Filter = 0;
init_config.Timing0 = 0x01;
init_config.Timing1 = 0x1c;
//波特率 250kinit_config.Mode = 0;
//正常模式if(InitCAN(DeviceType, DeviceInd, CAN1,&init_config)!=STATUS_OK)
{
Std::cout<<”初始化通道失败”<<std:endl;
CloseDevice(devtype DeviceInd);
return;
}
if(StartCAN(DeviceType, DeviceInd, CAN1)!=STATUS_OK)
{
Std::cout<<”打开通道失败”<<std:endl;
CloseDevice(devtype DeviceInd);
return;
if(InitCAN(DeviceType, DeviceInd, CAN2,&init_config)!=STATUS_OK)
{
Std::cout<<“初始化通道失败”<<std:endl;
CloseDevice(devtype DeviceInd);
return;
}
if(StartCAN(DeviceType, DeviceInd, CAN2)!=STATUS_OK)
{
Std::cout<<”打开通道失败”<<std:endl;
CloseDevice(devtype DeviceInd);
return;
}
m_connect=true;
CAN_OBJ frame;
Memset(&frame,0,sizeof(frame));
frame.ID=0x100;
frame. DataLen=8;
frame. SendType=0;
frame. RemoteFlag=0;
frame. ExternFlag=0
Byte data[]={1,2,3,4,5,6,7,8};
Memcpy(frame.data,data, frame. DataLen);
If (Transmit(DeviceType, DeviceInd, CAN1,&frame,1) !=STATUS_OK)
{
Std::cout<<”发送数据失败”<<std:endl;
}
CloseDevice(devtype DeviceInd);
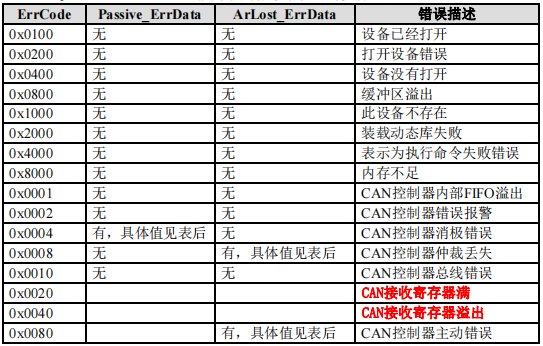
1.3错误码定义

表1.2错误码
1.4接口库函数结构体
1.4.1 BOARD_INFO
描述
BOARD_INFO结构体包含GCAN系列接口卡的设备信息。结构体将在ReadBoardInfo函数中被填充。
typedef struct _BOARD_INFO {
USHORT hw_Version;
USHORT fw_Version;
USHORT dr_Version;
USHORT in_Version;
USHORT irq_Num;
BYTE can_Num;
CHAR str_Serial_Num[20];
CHAR str_hw_Type[40];
USHORT Reserved[4];
} BOARD_INFO, *P_BOARD_INFO;
成员
hw_Version
硬件版本号,用16进制表示。
fw_Version
固件版本号,用16进制表示。
dr_Version
驱动程序版本号,用16进制表示。
in_Version
接口库版本号,用16进制表示。
irq_Num
板卡所使用的中断号。
can_Num
表示有几路CAN通道。
str_Serial_Num
此板卡的序列号。
str_hw_Type
硬件类型。
Reserved
系统保留。
1.4.2 CAN_OBJ
描述
CAN_OBJ结构体表示帧的数据结构。在发送函数Transmit和接收函数Receive中被用来传送CAN信息帧。
typedef struct _CAN_OBJ {
UINT ID;
UINT TimeStamp;
BYTE TimeFlag;
BYTE SendType;
BYTE RemoteFlag;
BYTE ExternFlag;
BYTE DataLen;
BYTE Data[8];
BYTE Reserved[3];
} CAN_OBJ, *P_CAN_OBJ;
成员
ID
报文帧ID。
TimeStamp
接收到信息帧时的时间标识,从CAN控制器初始化开始计时,单位微秒。
TimeFlag
是否使用时间标识,为1时TimeStamp有效,TimeFlag和TimeStamp只在此帧为接收帧时有意义。
SendType
发送帧类型。=0时为正常发送,=1时为单次发送(不自动重发),=2时为自发自收(用于测试CAN卡是否损坏),=3时为单次自发自收(只发送一次,用于自测试),只在此帧为发送帧时有意义。
RemoteFlag
是否是远程帧。=0时为数据帧,=1时为远程帧。
ExternFlag
是否是扩展帧。=0时为标准帧(11位帧ID),=1时为扩展帧(29位帧ID)。
DataLen
数据长度DLC(<=8),即Data的长度。
Data
CAN报文的数据。空间受DataLen的约束。
Reserved
系统保留。
1.4.3 CAN_STATUS
描述
CAN_STATUS结构体包含CAN控制器状态信息。结构体将在ReadCanStatus函数中被填充。
typedef struct _CAN_STATUS {
UCHAR ErrInterrupt;
UCHAR regMode;
UCHAR regStatus;
UCHAR regALCapture;
UCHAR regECCapture;
UCHAR regEWLimit;
UCHAR regRECounter;
UCHAR regTECounter;
DWORD Reserved;
} CAN_STATUS, *P_CAN_STATUS;
成员
ErrInterrupt
中断记录,读操作会清除。
regMode
CAN控制器模式寄存器。
regStatus
CAN控制器状态寄存器。
regALCapture
CAN控制器仲裁丢失寄存器。
regECCapture
CAN控制器错误寄存器。
regEWLimit
CAN控制器错误警告限制寄存器。
regRECounter
CAN控制器接收错误寄存器。
regTECounter
CAN控制器发送错误寄存器。
Reserved
系统保留。
1.4.4 ERR_INFO
描述
ERR_INFO结构体用于装载VCI库运行时产生的错误信息。结构体将在ReadErrInfo函数中被填充。
typedef struct _ERR_INFO {
UINT ErrCode;
BYTE Passive_ErrData[3];
BYTE ArLost_ErrData;
} ERR_INFO, *P_ERR_INFO;
成员
ErrCode
错误码。对应1.2中的错误码定义。
Passive_ErrData
当产生的错误中有消极错误时表示为消极错误的错误标识数据。
ArLost_ErrData
当产生的错误中有仲裁丢失错误时表示为仲裁丢失错误的错误标识数据。
1.4.5 INIT_CONFIG
描述
INIT_CONFIG结构体定义了初始化CAN的配置。结构体将在InitCan函数中被填充。在初始化之前,要先填好这个结构体变量。
typedef struct _INIT_CONFIG {
DWORD AccCode;
DWORD AccMask;
DWORD Reserved;
UCHAR Filter;
UCHAR Timing0;
UCHAR Timing1;
UCHAR Mode;
} INIT_CONFIG, *P_INIT_CONFIG;
成员
AccCode
验收码。SJA1000的帧过滤验收码。
AccMask
屏蔽码。SJA1000的帧过滤屏蔽码。屏蔽码推荐设置为0xFFFF FFFF,即全部接收。
Reserved
保留。
Filter
滤波使能。0=不使能,1=使能。使能时,请参照SJA1000验收滤波器设置验收码和屏蔽码。
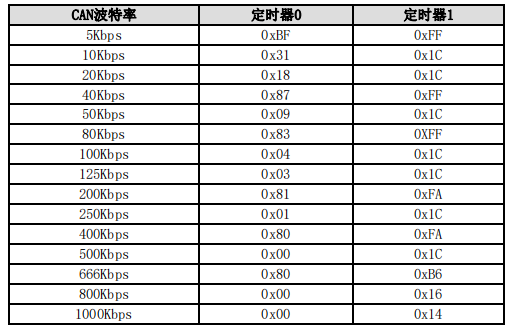
Timing0
波特率定时器0(BTR0)。设置值见下表。
Timing1
波特率定时器1(BTR1)。设置值见下表。
Mode
模式。=0为正常模式(相当于正常节点),=1为只听模式(只接受,不发送,不会响应CAN总线ACK应答),=2为自发自收模式。(自动将接收到的数据返回到CAN总线)
如果您需要进行滤波设置,您可以对AccCode和AccMask进行填充。填充值需要使用CANTest软件进行计算。请注意,本结构体仅接受双滤波的计算值,单滤波无效。
备注
Timing0和Timing1用来设置CAN波特率,以下是几种常见的波特率。如果要使用表中没有列出的波特率,请联系广成科技技术支持。
1.4.6 FILTER_RECORD
描述
FILTER_RECORD结构体定义了CAN滤波器的滤波范围。结构体将在SetReference函数中被填充。
typedef struct _FILTER_RECORD{
DWORD ExtFrame;
DWORD Start;
DWORD End;
} FILTER_RECORD,*P_FILTER_RECORD;
成员
ExtFrame
过滤的帧类型标志,为1代表要过滤的为扩展帧,为0代表要过滤的为标准帧。
Start
滤波范围的起始帧ID。
End
滤波范围的结束帧ID。
1.5接口库函数说明
1.5.1 OpenDevice
描述
此函数用以打开设备。一个设备只能被打开一次,如需再次将已经打开的设备关闭。
DWORD __stdcall OpenDevice(DWORD DevType,DWORD DevIndex, DWORD Reserved);
参数
DevType
设备类型号。USBCAN I 选择3,USBCAN II 选择4。
DevIndex
设备索引号,根据设备SN号码从小到大分配索引号。
Reserved
参数无意义。
返回值
为1表示操作成功,0表示操作失败。
示例
#include "ECanVci.h"
int nDeviceType = 3; /* USBCAN-I */
int nDeviceInd = 0; /* 设备索引号*/
int nReserved =0;
DWORD dwRel;
dwRel = OpenDevice(nDeviceType, nDeviceInd, nReserved);
if (dwRel != 1)
{
MessageBox(_T("打开设备失败!"),_T("警告"), MB_OK|MB_ICONQUESTION);
return FALSE;
}
1.5.2 CloseDevice
描述
此函数用于关闭设备,关闭设备和打开设备一一对应。
DWORD __stdcall CloseDevice(DWORD DevType, DWORD DevIndex);
参数
DevType
设备类型号。
DevIndex
设备索引号。对应已将打开的设备。
返回值
为1表示操作成功,0表示操作失败。
示例
#include "ECanVci.h"
int nDeviceType = 3; /* USBCAN-I */
int nDeviceInd = 0; /* 设备索引号*/
CloseDevice(nDeviceType, nDeviceInd);
1.5.3 InitCan
描述
此函数用以初始化指定的CAN通道。有多个CAN通道时,需要多次调用。用于设备波特率、硬件滤波、CAN工作模式。
DWORD __stdcall InitCan(DWORD DevType, DWORD DevIndex, DWORD CANIndex,
P_INIT_CONFIG *pInitConfig);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。即对应卡的CAN通道号,CAN0为0,CAN1为1。
pInitConfig
初始化参数结构,详见1.4.5。
返回值
为1表示操作成功,0表示操作失败。
示例
#include "ECanVci.h"
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0; // 索引号为0
int nCANInd = 0;
int nReserved = 0;
DWORD dwRel;
INIT_CONFIG init_config;
init_config.AccCode = 0;
init_config.AccMask =0xffffffff;// 不滤波
init_config.Filter = 0;
//500k
init_config.Timing0 = 0;
init_config.Timing1 = 0x1c;//500k
init_config.Mode = 0;
dwRel = InitCAN(nDeviceType, nDeviceInd, nCANInd, &init_config)
if (dwRel != STATUS_OK)
{
MessageBox(_T("设备初始化失败!"), _T("警告"), MB_OK|MB_ICONQUESTION);
}
1.5.4 ReadBoardInfo
描述
此函数用以获取设备信息:设备SN、软件版本、硬件版本、驱动版本、通道数。
DWORD __stdcall ReadBoardInfo(DWORD DevType, DWORD DevIndex, P_BOARD_INFO *pInfo);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
pInfo
用来存储设备信息的BOARD_INFO结构指针,详见1.4.1。
返回值
为1表示操作成功,0表示操作失败。
示例
#include "ECanVci.h"
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
INIT_CONFIG vic;
BOARD_INFO vbi;
DWORD dwRel;
String SN=“”;
dwRel = ReadBoardInfo(nDeviceType, nDeviceInd, &vbi);
if (dwRel != STATUS_OK)
{
MessageBox(_T("读取设备信息失败!"), _T("警告"),
MB_OK|MB_ICONQUESTION);
}
Else
{
For (int i=0;i<11;i++)
{
SN=SN+(char)vbi.str_Serial_Num[i];//获取设备SN
}
}
1.5.5 ReadErrInfo
描述
此函数用以获取USBCAN分析仪最后一次错误信息。
DWORD __stdcall ReadErrInfo(DWORD DevType, DWORD DevIndex, DWORD CANIndex, P_ERR_INFO *pErrInfo);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN通道。
pErrInfo
用来存储错误信息的ERR_INFO结构指针,详见1.4.4。
pErrInfo->ErrCode可能为下列各个错误码的多种组合之一:
返回值
为1表示操作成功,0表示操作失败。
备注
当(PErrInfo->ErrCode&0x0004)==0x0004时,存在CAN控制器消极错误。
PErrInfo->Passive_ErrData[0]错误代码捕捉位功能表示

错误代码类型功能说明
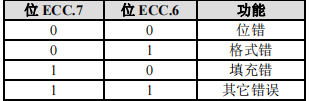
错误属性
bit5 =0;表示发送时发生的错误。
bit5 =1;表示接收时发生的错误。
错误段表示功能说明
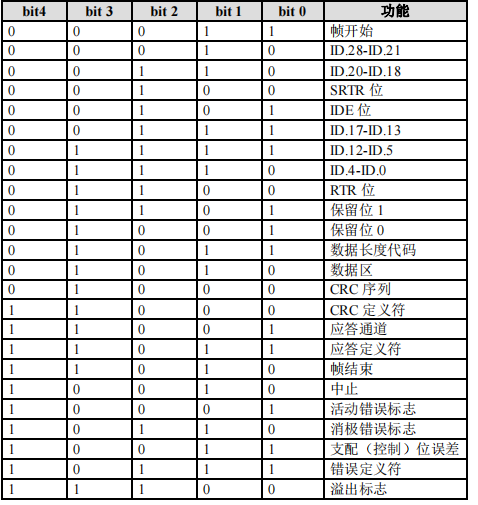
PErrInfo->Passive_ErrData[1]:表示接收错误计数器
PErrInfo->Passive_ErrData[2]:表示发送错误计数器
当(PErrInfo->ErrCode&0x0008)==0x0008时,表示存在CAN控制器仲裁丢失错误。
PErrInfo->ArLost_ErrData 仲裁丢失代码捕捉位功能表示

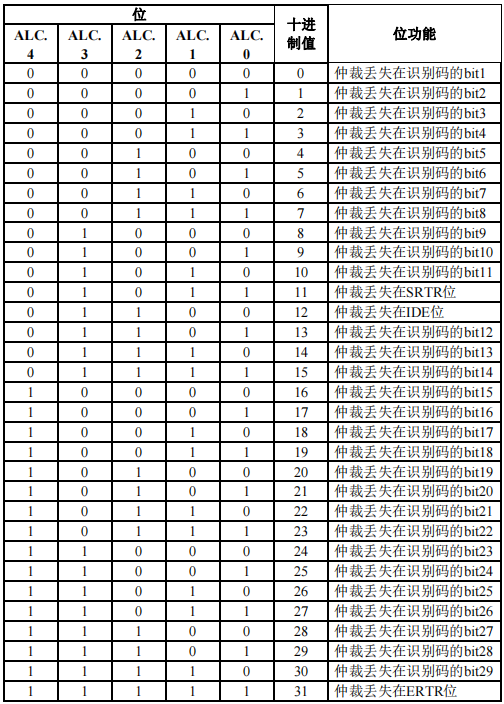
示例
#include "ECanVci.h"
int nDeviceType =3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
ERR_INFO vei;
DWORD dwRel;
dwRel = ReadErrInfo(nDeviceType, nDeviceInd, nCANInd, &vei);
1.5.6 ReadCanStatus
描述
此函数用以获取CAN状态。
DWORD __stdcall ReadCanStatus(DWORD DevType, DWORD DevIndex, DWORD CANIndex, P_CAN_STATUS *pCANStatus);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。
pCANStatus
用来存储CAN状态的CAN_STATUS结构指针,详见1.4.3。
返回值
为1表示操作成功,0表示操作失败。
示例
#include "ECanVci.h"
int nDeviceType = 4; // USBCAN-II
int nDeviceInd = 0;
int nCANInd = 0;
INIT_CONFIG vic;
CAN_STATUS vcs;
DWORD dwRel;
dwRel = ReadCanStatus(nDeviceType, nDeviceInd, nCANInd, &vcs);
1.5.7 GetReference
描述
此函数用以获取设备的相应参数。
DWORD __stdcall GetReference(DWORD DevType, DWORD DevIndex, DWORD CANIndex, DWORD RefType, PVOID *pData);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。
RefType
参数类型。
pData
用来存储参数有关数据缓冲区地址首指针。
返回值
为1表示操作成功,0表示操作失败。
示例
#include "ECanVci.h"
int nDeviceType = 4; // USBCAN-II
int nDeviceInd = 0;
int nCANInd = 0;
BYTE info[14];
DWORD dwRel;
info[0] = 1;
dwRel = GetReference(nDeviceType, nDeviceInd, nCANInd, 1, (PVOID)info);
1.5.8 SetReference
描述
此函数用以设置设备的相应参数,主要处理不同设备的特定操作。(可用于设备滤波)
DWORD __stdcall SetReference(DWORD DevType, DWORD DevIndex, DWORD CANIndex, DWORD RefType, PVOID *pData);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。
RefType
参数类型。
pData
用来存储参数有关数据缓冲区地址首指针。
返回值
为1表示操作成功,0表示操作失败。
示例
///滤波演示
#include "ECanVci.h"
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
INIT_CONFIG init_config;
init_config.AccCode = 0;
init_config.AccMask =0xffffff;
init_config.Filter = 0;
init_config.Timing0 = 0; ///1000k
init_config.Timing1 =0x14;
init_config.Mode = 0;
if(OpenDevice(nDeviceType,nDeviceInd,0)!=STATUS_OK)
{
MessageBox(_T("打开设备失败!"), _T("警告"), MB_OK|MB_ICONQUESTION);
return;
}
ShowInfo("Open device Success",0);
if(InitCAN(nDeviceType,nDeviceInd, nCANInd,&init_config)!=STATUS_OK)
{
MessageBox(_T("设备初始化失败!"), _T("警告"), MB_OK|MB_ICONQUESTION);
return;
}
DWORD dwRel;
FILTER_RECORD filter_record;
filter_record.ExtFrame = 1;///只接收标准扩展帧
filter_record.Start = 0x000;///起始ID为0x000
filter_record.End = 0x001;///结束ID为0x001
///只接收ID是0x000和0x001的扩展帧
SetReference(nDeviceType, nDeviceInd, nCANInd, 1, &filter_record);
if(StartCAN(nDeviceType, nDeviceInd, nCANInd)==1)
{
ShowInfo("Start Success",0);
}
1.5.9 GetReceiveNum
描述
此函数用以获取指定接收缓冲区中接收到但尚未被读取的帧数量。
ULONG __stdcall GetReceiveNum(DWORD DevType, DWORD DevIndex, DWORD CANIndex);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。
返回值
返回尚未被读取的帧数。
示例
#include "ECanVci.h"
int nDeviceType =3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
DWORD dwRel;
dwRel = GetReceiveNum(nDeviceType, nDeviceInd, nCANInd);
1.5.10 ClearBuffer
描述
此函数用以清空指定CAN通道的缓冲区。
DWORD __stdcall ClearBuffer(DWORD DevType, DWORD DevIndex, DWORD CANIndex);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。
返回值
为1表示操作成功,0表示操作失败。
示例
#include "ECanVci.h"
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
DWORD dwRel;
dwRel = ClearBuffer(nDeviceType, nDeviceInd, nCANInd);
1.5.11 StartCAN
描述
此函数用以启动USBCAN设备的某一个CAN通道。如有多个CAN通道时,需要多次调用。在执行StartCAN函数后,需要延迟10ms执行Transmit函数。
DWORD __stdcall StartCAN(DWORD DevType, DWORD DevIndex, DWORD CANIndex);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。
返回值
为1表示操作成功,0表示操作失败。
示例
#include "ECanVci.h"
int nDeviceType =3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
int nReserved = 0;
INIT_CONFIG vic;
DWORD dwRel;
dwRel = OpenDevice(nDeviceType, nDeviceInd, nReserved);
if (dwRel != STATUS_OK)
{
MessageBox(_T("打开设备失败!"), _T("警告"), MB_OK|MB_ICONQUESTION);
return FALSE;
}
dwRel = InitCAN(nDeviceType, nDeviceInd, nCANInd, &vic);
if (dwRel == STATUS_ERR)
{
CloseDevice(nDeviceType, nDeviceInd);
MessageBox(_T("初始化设备失败!"), _T("警告"), MB_OK|MB_ICONQUESTION);
return FALSE;
}
dwRel = StartCAN(nDeviceType, nDeviceInd, nCANInd);
if (dwRel == STATUS_ERR)
{
CloseDevice(nDeviceType, nDeviceInd);
MessageBox(_T("启动设备失败!"), _T("警告"), MB_OK|MB_ICONQUESTION);
return FALSE;
}
1.5.12 Transmit
描述
返回实际发送成功的帧数量。
ULONG __stdcall Transmit(DWORD DevType, DWORD DevIndex, DWORD CANIndex, P_CAN_OBJ *pSend, ULONG Len);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。
pSend
结构体CAN_OBJ数组的首指针,详见1.4.2。
Len
报文数目。
返回值
返回实际发送的帧数。
示例
#include "ECanVci.h"
#include <string.h>
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0; // 索引1
int nCANInd = 0; // CAN1通道
DWORD dwRel;
CAN_OBJ vco; //需要发送数据的结构体
ZeroMemory(&vco, sizeof (CAN_OBJ));
vco.ID = 0x00000000; //ID=0x000
vco.SendType = 0; //正常发送
vco.RemoteFlag = 0; //数据帧
vco.ExternFlag = 0; //标准帧
vco.DataLen = 8; //数据长度为8
for (int i=0;i<7;i++)
{
Vco.Data[i]=i; //数据
}
dwRel = Transmit(nDeviceType, nDeviceInd, nCANInd, &vco, 1);
//单次执行发送一条
1.5.13 Receive
描述
此函数从指定的设备CAN通道的缓冲区里读取数据。
ULONG __stdcall Receive(DWORD DevType, DWORD DevIndex, DWORD CANIndex, P_CAN_OBJ *pReceive, ULONG Len, INT WaitTime=-1);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。
pReceive
结构体CAN_OBJ数组的首指针,详见1.4.2。
Len
数组长度(本次接收的最大报文数目,实际返回值小于等于这个值)。
WaitTime
缓存区无数据,函数阻塞等待时间等,以毫秒为单位,推荐设置成0,即不等待。
返回值
返回实际读取到的帧数。如果返回值为0xFFFFFFFF,则表示读取数据失败,有错误发生,请调用ReadErrInfo函数来获取错误码。
示例
#include "ECanVci.h"
#include <string.h>
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
DWORD dwRel;
CAN_OBJ vco[100];
dwRel = Receive(nDeviceType, nDeviceInd, nCANInd, vco, 100, 0);//单次执行函数读取最多100条数据
1.5.14 ResetCAN
描述
此函数用以复位CAN。如当USBCAN分析仪进入总线关闭状态时,可以调用这个函数。
DWORD __stdcall ResetCAN(DWORD DevType, DWORD DevIndex, DWORD CANIndex);
参数
DevType
设备类型号。
DevIndex
设备索引号,比如当只有一个设备时,索引号为0,有两个时可以为0或1。
CANIndex
第几路CAN。
返回值
为1表示操作成功,0表示操作失败。
示例
#include "ECanVci.h"
int nDeviceType = 4;// USBCAN-II
int nDeviceInd = 0;
int nCANInd = 0;
DWORD dwRel;
dwRel = ResetCAN(nDeviceType, nDeviceInd, nCANInd);
1.6 接口库函数使用方法
首先,把库函数文件都放在工作目录下。库函数文件总共有三个文件:ECanVci.h、ECanVci.lib、ECanVci.dll。
1.6.1 VC 调用动态库的方法
(1) 在扩展名为.CPP 的文件中包含 ECANVCI.h 头文件。
如:#include “ECANVci.h”
(2) 在工程的连接器设置中连接到 ECANVCI.lib 文件。
如:在 VC7 环境下,在项目属性页里的配置属性→连接器→输入→附加依赖项中添加ECANVCI.lib;
在 VC6 环境下,在 CPP 文件中加入静态库调用: #pragma comment(lib,"ECANVCI")
1.6.2 VB 调用动态库的方法
通过以下方法进行声明后就可以调用了。
语法:
[Public | Private] Declare Function name Lib "libname" [Alias "aliasname"]
[([arglist])] [As type]
Declare 语句的语法包含下面部分:
Public(可选)
用于声明在所有模块中的所有过程都可以使用的函数。
Private(可选)
用于声明只能在包含该声明的模块中使用的函数。
Name(必选)
任何合法的函数名。动态链接库的入口处(entry points)区分大小写。
Libname(必选)
包含所声明的函数动态链接库名或代码资源名。
Alias(可选)
表示将被调用的函数在动态链接库 (DLL) 中还有另外的名称。当外部函数名与某个函数重名时,就可以使用这个参数。当动态链接库的函数与同一范围内的公用变量、常数或任何其它过程的名称相同时,也可以使用 Alias。如果该动态链接库函数中的某个字符不符合动态链接库的命名约定时,也可以使用 Alias。
Aliasname(可选)
动态链接库。如果首字符不是数字符号(#),则 aliasname 是动态链接库中该函数入口处的名称。如果首字符是(#),则随后的字符必须指定该函数入
口处的顺序号。
Arglist(可选)
代表调用该函数时需要传递参数的变量表。
Type(可选)
Function返回值的数据类型;可以是 Byte、Boolean、Integer、Long、Currency、Single、Double、Decimal(目前尚不支持)、Date、String(只支持变长)或Variant,用户定义类型,或对象类型。
arglist 参数的语法如下:
[Optional] [ByVal | ByRef] [ParamArray] varname[( )] [As type]
部分描述:
Optional(可选)
表示参数不是必需的。如果使用该选项,则 arglist 中的后续参数都必需是可选的,而且必须都使用Optional 关键字声明。如果使用了 ParamArray,则任何参数都不能使用 Optional。
ByVal(可选)
表示该参数按值传递。
ByRef(可选)
表示该参数按地址传递。
例如:
Public Declare Function OpenDevice Lib "ECANVCI" (ByVal devicetype As Long, ByVal deviceind As Long, ByVal reserved As Long) As Long
1.7 接口库函数
- OpenDevice(DWORD DeviceType,DWORD DeviceInd,DWORD Reserved);
- CloseDevice(DWORD DeviceType,DWORD DeviceInd);
- InitCAN(DWORD DeviceType, DWORD DeviceInd, DWORD CANInd, P_INIT_CONFIG *pInitConfig);
- ReadBoardInfo(DWORD DeviceType,DWORD DeviceInd,P_BOARD_INFO* pInfo);
- ReadErrInfo(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,P_ERR_INFO* pErrInfo);
- ReadCANStatus(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,P_CAN_STATUS *pCANStatus);
- GetReference(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,DWORD RefType,PVOID *pData);
- SetReference(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,DWORD RefType,PVOID* pData);
- GetReceiveNum(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd);
- ClearBuffer(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd);
- StartCAN(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd);
- ResetCAN(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd);
- Transmit(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,P_CAN_OBJ *pSend,ULONG Len);
- Receive(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,P_CAN_OBJ *pReceive,ULONG Len,INT WaitTime);
1.8 常用功能样例
1.8.1 滤波设置
方法一(使用 SetReference)
#include "ECanVci.h"
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
INIT_CONFIG init_config;
init_config.AccCode = 0;
init_config.AccMask =0xffffffff;
init_config.Filter = 0;
init_config.Timing0 = 0;
init_config.Timing1 =0x14; //1000k
init_config.Mode = 0;
if(OpenDevice(nDeviceType,nDeviceInd,0)!=STATUS_OK)
{
MessageBox(_T("打开设备失败!"), _T("警告"),
MB_OK|MB_ICONQUESTION);
return;
}
ShowInfo("Open device Success",0);
if(InitCAN(nDeviceType,nDeviceInd, nCANInd,&init_config)!=STATUS_OK)
{
MessageBox(_T("设备初始化失败!"), _T("警告"),
MB_OK|MB_ICONQUESTION);
return;
}
DWORD dwRel;
FILTER_RECORD filter_record;
filter_record.ExtFrame = 1;///只接收扩展帧
filter_record.Start = 0x000;///起始ID为0x000
filter_record.End = 0x001;///结束ID为0x001
///只接收ID是0x000和0x001的扩展帧
SetReference(nDeviceType, nDeviceInd, nCANInd, 1, &filter_record);
if(StartCAN(nDeviceType, nDeviceInd, nCANInd)==1)
{
ShowInfo("Start Success",0);
}
方法二(使用屏蔽码和验收码)
#include "ECanVci.h"
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
INIT_CONFIG init_config;
init_config.AccCode = 0x 00200000;
init_config.AccMask =0x 001FFFFF;//只接受ID是0x001的标准帧数据
init_config.Filter = 0;
init_config.Timing0 = 0;
init_config.Timing1 =0x14; //1000k
init_config.Mode = 0;
if(OpenDevice(nDeviceType,nDeviceInd,0)!=STATUS_OK)
{
MessageBox(_T("打开设备失败!"), _T("警告"),
MB_OK|MB_ICONQUESTION);
return;
}
ShowInfo("Open device Success",0);
if(InitCAN(nDeviceType,nDeviceInd, nCANInd,&init_config)!=STATUS_OK)
{
MessageBox(_T("设备初始化失败!"), _T("警告"),
MB_OK|MB_ICONQUESTION);
return;
}
SetReference(nDeviceType, nDeviceInd, nCANInd, 1, &filter_record);
if(StartCAN(nDeviceType, nDeviceInd, nCANInd)==1)
{
ShowInfo("Start Success",0);
}
1.8.2 读取设备 SN
#include "ECanVci.h"
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
INIT_CONFIG vic;
BOARD_INFO vbi;
DWORD dwRel;
String SN=“”;
dwRel = ReadBoardInfo(nDeviceType, nDeviceInd, &vbi);
if (dwRel != STATUS_OK)
{
MessageBox(_T("读取设备信息失败!"), _T("警告"),
MB_OK|MB_ICONQUESTION);
}
Else
{
For (int i=0;i<11;i++)
{
SN+=(char)vbi.str_Serial_Num[i];//获取设备SN
}
Std::cout<< SN <<std:endl;
}
1.8.3 批量读取数据
#include "ECanVci.h"
#include <string.h>
int nDeviceType = 3; // USBCAN-I
int nDeviceInd = 0;
int nCANInd = 0;
int len =100
DWORD dwRel;
CAN_OBJ frameinfo [100];
dwRel = Receive(nDeviceType, nDeviceInd, nCANInd, frameinfo, len, 0);
//单次执行函数读取最多100条数据
If (dwRel>0)
{
For (int i=0;i<len;)
{
String str=” Rec:”;
if(frameinfo[i].TimeFlag==0)
tmpstr="Time: ";
else
tmpstr.Format(_T("Time:%08x"),frameinfo[i].TimeStamp);
str+=tmpstr;
tmpstr.Format(_T("ID:%08x "),frameinfo[i].ID);
str+=tmpstr;
str+="Format:";
if(frameinfo[i].RemoteFlag==0)
tmpstr="Data ";
else
tmpstr="Romte ";
str+=tmpstr;
str+="Type:";
if(frameinfo[i].ExternFlag==0)
tmpstr="Stand ";
else
tmpstr="Exten ";
str+=tmpstr;
if(frameinfo[i].RemoteFlag==0)
{
Str+="Data:";
if(frameinfo[i].DataLen>8)
frameinfo[i].DataLen=8;
for(int j=0;j<frameinfo[i].DataLen;j++)
{
tmpstr.Format(_T("%02x "),frameinfo[i].Data[j]);
str+=tmpstr;
}
}
Std::cout<<str<<std:endl;
}
}
