

1. 修改 ID 及波特
下表是 RS232 线的引脚定
| 引脚序号 | 名称 | 作用 |
| 1 | DCD (Data Carrier Detect) | 数据载波检测 |
| 2 | RxD (Received Data) | 串口数据输入 |
| 3 | TxD Transmitted Data | 串口数据输出 |
| 4 | DTR Data Terminal Ready) | 数据终端就绪 |
| 5 | GND Signal Ground) | 地线 |
| 6 | DSR Data Send Ready | 数据发送就绪 |
| 7 | RTS (Request to Send) | 发送数据请求 |
| 8 | CTS (Clear to Send) | 清除发送 |
| 9 | RI Ring Indicator) | 铃声指示 |
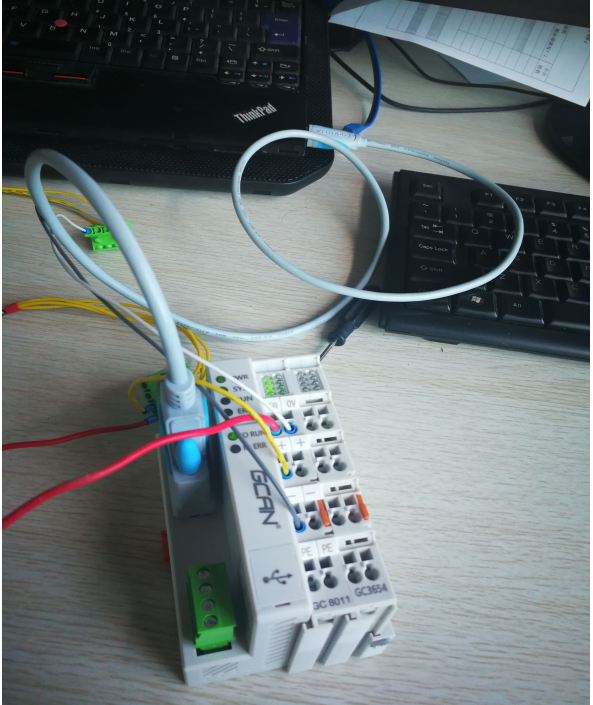
通过 232 端口,可以修改相应的参数。具体操作如下,将 GCAN8000 与电脑用
232 线连接起来,如图所示
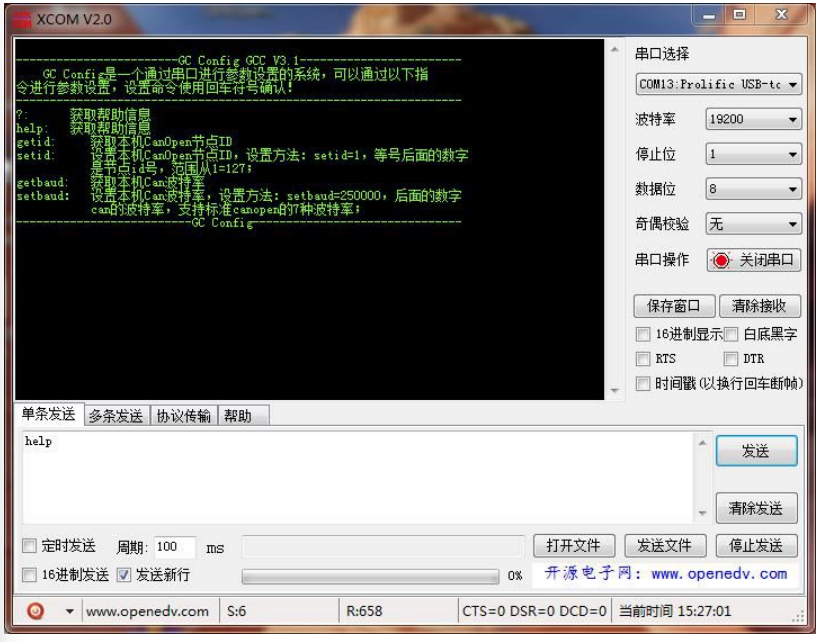
然后打开设备管理器,查看 COM 口,然后打开串口调试助手(1.串口助手软件XCOM),如下图设置:
选择电脑读到的 COM 口,波特率 19200,停止位 1,数据位 8,奇偶校验无,发送英文字符 help 或者?,勾选发送新行,点击发送,就会出现如图的提示,根据提示输入相应的命令就可以修改对应的参数了。
例如:getid:可以获得本机 canopen 节点 ID;
setid:设置本机 canopen 节点 ID,方法:setid=1,即 ID 号为 1,范围是 1~127.
getbaud:获取本机 can 波特率。
setbaud:设置本机波特率,方法:setbaud=250000,即设置波特率为 250K,支持 canopen 的 7 种标准波特率。
注:
2. 接线
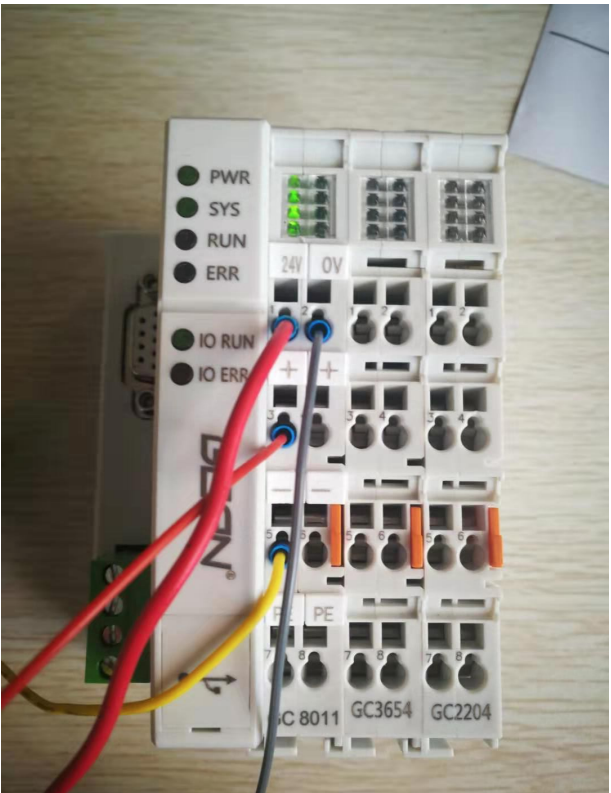
通电:1 和 2 分别连 24V 和 0V,3 或 4 其中一个接入 24V 即可,5 或 6 其中一个接入 0V 即可。PE 不接。这样,GCAN8000 就正常供电了。正常状态应该是PWR 灯常亮,SYS 灯闪烁,RUN 灯闪烁,IO RUN 灯闪烁。GC8011 电源模块的左侧4 个灯亮起。如图所示,
注:
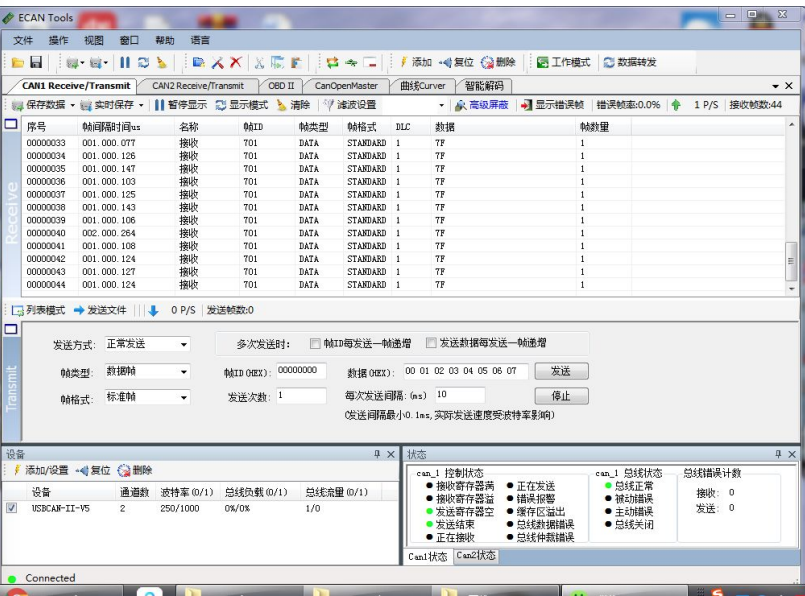
可以用我们公司的can分析仪和GCANTOOLS软件(1. GCAN Tools调试分析软件can )与GCAN8000进行收发数据,连接如图所示。CAN 分析仪使用的是 CAN1 通道,将 120Ω拨码开关拨到ON,CANL 接 CAN1 的 L,CANH 接 CAN1的H。如图所示

连接好之后打开 ECANTOOLS 软件,点击打开设备,用的 CAN1 通道就选择CAN1, 用的 CAN2 通道就选择 CAN2.波特率默认 250K,节点号默认是 1,设定好之后点击确定。

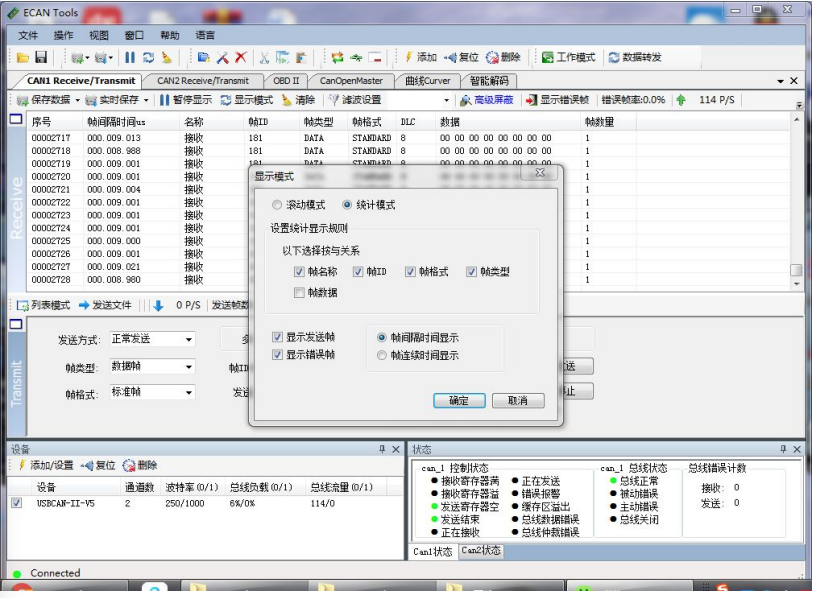
会出现如下图所示的心跳指令,帧 ID 为 701,数据为
将显示模式改成统计模式
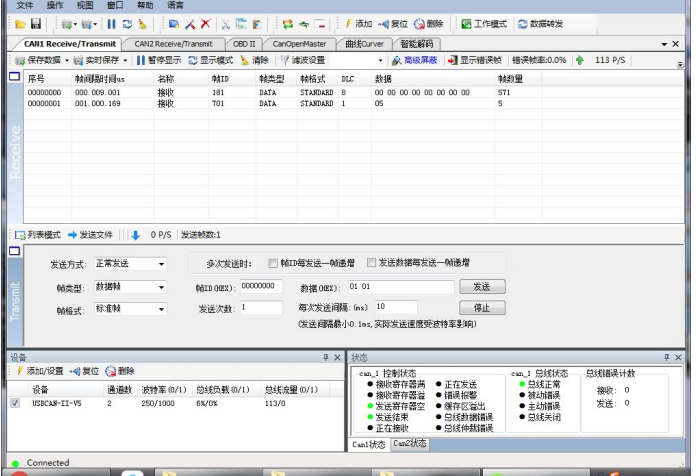
如图所示,帧 ID 为 0,发送 01 01 数据启动之后,会收到两种数据,一种是帧ID 为 181 的 8 字节数据,这是因为 GCAN8000 接了一个 3654(后面会详细讲解);和一个帧 ID 为 701 的数据,显示为 05,只有一个字节,一秒钟 1 帧这个是心跳数据,无论 GCAN8000 后面是否接 IO 模块,只要发送启动指令后,就会接收到这个数据。
3. 与 IO 片连接
3.1 搭载 GC-1008 模
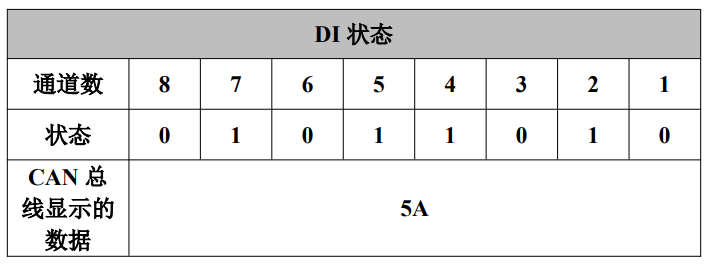
数字量输入的状态由一个字节来表示,通道 8 在高位,通道 1 在低位。例如,GCAN-IO-8000 模块节点号设为 1。通道 8 和通道 4 状态为 1,其他状态均为 0,则 CAN 总线一端显示的 DI 状态数据为 88。则发出的帧 ID 为 0x181,数据长度(DLC)为 8,帧数据为 0x88,0x00,0x00,0x00,0x00,0x00,0x00,0x00。请注意,仅插入一个 GCAN-1008 模块时,帧数据中只有第一个字节是有效的。下表列举了两种常见的 DI 状态及其对应的状态数据。
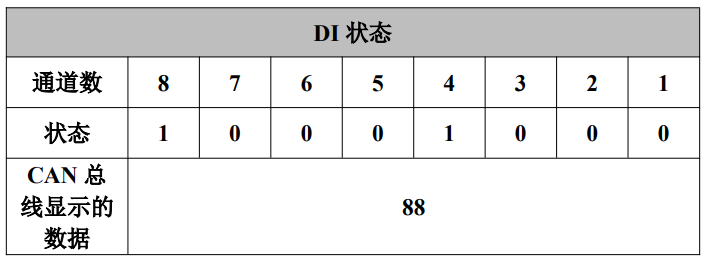
仅插入一个 GCAN-1008 模块时,GCAN-IO-8000 模块发出的 TPDO 数据帧ID 为 0x180+节点号(Node ID),数据长度为 8,帧数据第一个字节即为该模块数字量输入状态。
3.2 搭载 GC-2008 模
数字量输出的状态由一个字节来表示,通道 8 在高位,通道 1 在低位。例如,GCAN-IO-8000 模块节点号设为 1。需设置通道 8 和通道 4 状态为 1,设置其他状态均为 0,则需要发送的 CAN 总线 DO 状态数据为 88。需要发送给GCAN-IO-8000 的帧 ID 为 0x201,数据长度(DLC)为 8,帧数据为 0x88,0x00,0x00,0x00,0x00,0x00,0x00,0x00。请注意,帧数据中只有第一个字节是有效的。下表列举了两种常见的 DO状态及其对应的状态数据。
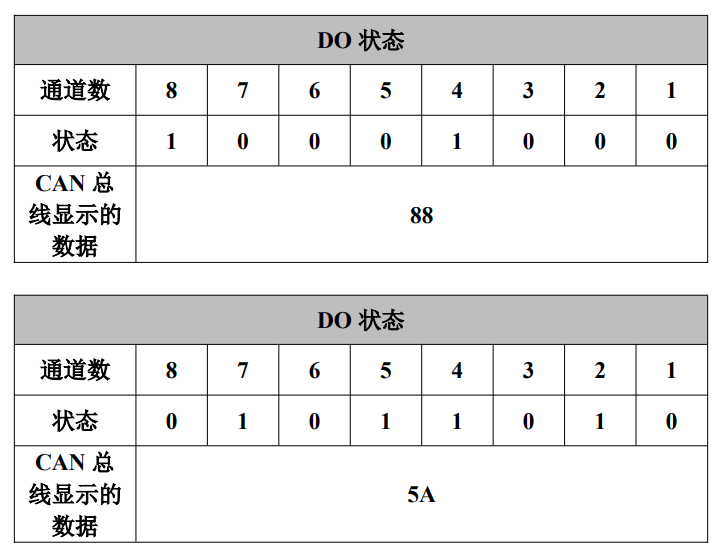
GCAN-IO-8000 模块在接收 RPDO 数据时,需保证帧 ID 为 0x200+节点号(Node ID),数据长度为 8,帧数据第一个字节即为需要设置的数字量输出状态。
3.3 搭载 GC-3804 模块
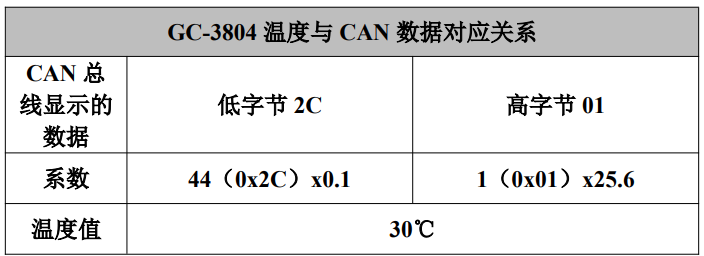
每个通道的温度状态由两个字节来表示,四个通道共八个字节。其中,代表温度状态的两个字节,第一个字节为低位,需将该字节的数据转换为十进制后乘以 0.1;第二个字节为高位,需将该字节的数据转换为十进制之后乘以 25.6。最后将两个数值加和,即为最终的温度值,单位为摄氏度。例如,GCAN-IO-8000 模块节点号设为 1。四个通道的温度分别为 25.6 度,25.5 度,20 度,30 度。则发出的帧 ID 为 0x181,数据长度(DLC)为 8,帧数据为 0x00,0x01,0xFF,0x00,0xC8,0x00,0x2C,0x01。下表列举了两种可能的 CAN数据及其对应的温度值。
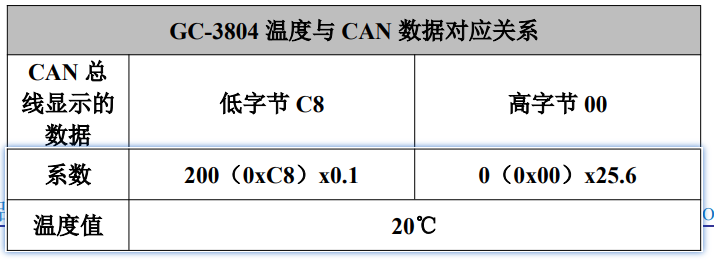
GCAN-IO-8000 模块在发出 TPDO 数据时,帧 ID 为 0x180+节点号(Node ID),数据长度为 8。如未接入 PT100,则对应通道的 CAN 数据会显示为 FF 7F。
3.4 同时搭载多组模块
若 GCAN-IO-8000 同时搭载多组 GC-1008 模块,那么我们以它们距离GCAN-IO-8000 的远近,从近到远进行编号,离得最近的为 1 号。GCAN-IO-8000耦合器发出的 TPDO 数据将按照下表进行发送。例如,当 GCAN-IO-8000 节点号为 3 且同时搭载 9 个 GC-1008 模块时,您将收到帧 ID 为 0x183 和 0x283 两组数据。其中,帧 ID 为 0x183 的八个数据字节依次对应 1-8 号 GC-1008 模块;帧ID 为 0x283 的一个数据字节对应 9 号 GC-1008 模块。
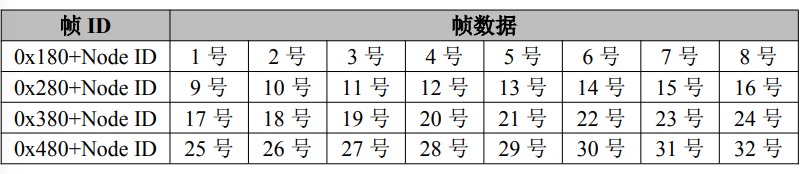
表 4.1 多组 GC-1008 模块与 CAN 数据对应关系
若 GCAN-IO-8000 同时搭载多组 GC-2008 模块,那么我们以它们距离GCAN-IO-8000 的远近,从近到远进行编号,离得最近的为 1 号。GCAN-IO-8000耦合器接收的 RPDO 数据需按照下表进行发送。例如,当 GCAN-IO-8000节点号为 3 且同时搭载 9 个 GC-2008 模块时,您需要发送帧 ID 为 0x203 和 0x303 两组数据以控制全部的 9 个模块。其中,帧 ID 为 0x203 的八个数据字节依次对应1-8 号 GC-2008 模块;帧 ID 为 0x303 的一个数据字节对应 9 号 GC-2008模块。
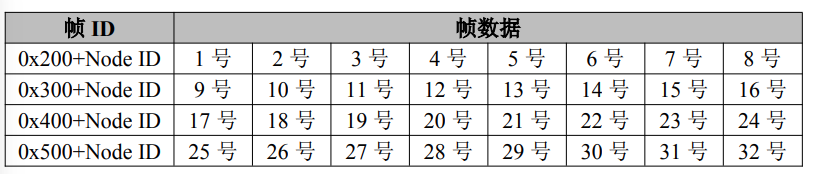
表 4.2 多组 GC-2008 模块与 CAN数据对应关系
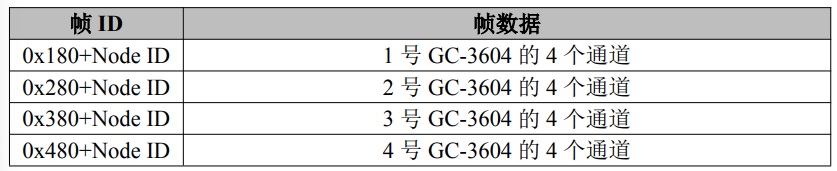
若 GCAN-IO-8000 同时搭载多组 GC-3804 模块,那么我们以它们距离GCAN-IO-8000 的远近,从近到远进行编号,离得最近的为 1 号。GCAN-IO-8000耦合器发出的 TPDO 数据将按照下表进行发送。例如,当 GCAN-IO-8000 节点号为 3 且同时搭载 4 个 GC-3804 模块时,您将收到帧 ID 为 0x183 等四组数据。其中,帧 ID 为 0x183 的八个数据字节依次对应 1 号 GC-3804 模块的 4 个通道;帧 ID 为 0x283 的八个数据字节依次对应 2 号 GC-3804 模块的 4 个通道。
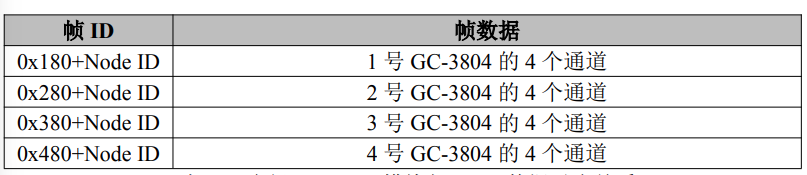
表 4.3 多组 GC-3804 模块与 CAN 数据对应关系
若 GCAN-IO-8000 同时搭载 GC-1008 模块与 GC-3804 模块,那么我们以它们距离 GCAN-IO-8000 的远近,从近到远进行编号,离得最近的为 1 号。GCAN-IO-8000 耦合器发出的 TPDO 数据将按照下表进行发送。例如,当GCAN-IO-8000 模块节点号为 3 且同时搭载 3 个 GC-1008 模块和 1 个 GC-3804模块时,您将收到帧 ID 为 0x183 和 0x283 两组数据。数据对应关系如下表所示。
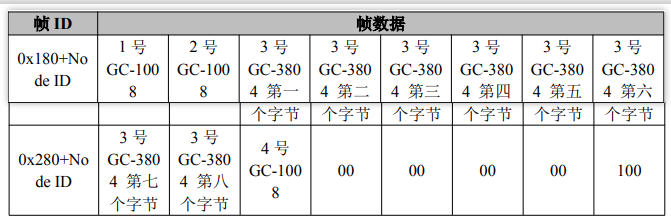
表 4.4 多组 GC-1008 模块与 GC-3804 模块混用时与 CAN 数据的对应关系
3.5 搭载 GC-2302 模块
一个 2302 有两个通道,即 ch1 和 ch2. 2302 的 device 从靠近 8000 的开始是 1,第二个是 2,以此类推。
(1)电机模式初始化:
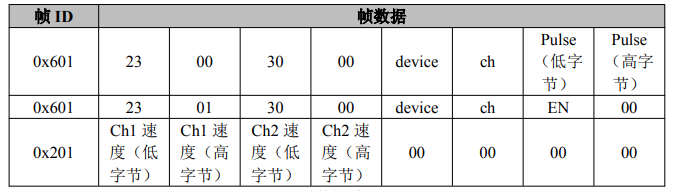
canopen index=0x3000,subindex=0,data=pulse(2 byte)+device index(1byte)+channel(1 byte)
example:device=1,ch=1,pulse=5000
send pdo: 0x601 23 00 30 00 01 01 88 13
example:device=1,ch=2,pulse=5000
send pdo: 0x601 23 00 30 00 01 02 88 13
example:device=2,ch=1,pulse=5000
send pdo: 0x601 23 00 30 00 02 01 88 13
example:device=2,ch=2,pulse=5000
send pdo: 0x601 23 00 30 00 02 02 88 13
(2)电机模式使能
canopen index=0x3001,subindex=0,data=00+ EN(1 byte)+device index(1byte)+channel(1 byte)
example:device=1,ch=1,EN=1
send pdo:0x601 23 01 30 00 01 01 01 00
example:device=1,ch=1,EN=0
send pdo:0x601 23 01 30 00 01 01 00 00
example:device=1,ch=2,EN=1
send pdo:0x601 23 01 30 00 01 02 01 00
先发送初始化命令,再发送使能命令,2302 才会工作
(3)速度控制
发送 PDO 以控制电机速度、速度值(2 字节),对于 0.1x,EX:如果您设置速度Vale 为 1000,则实际电机速度为 1000*0.1=100
例如:GCAN8000 有 1 个 GC2302 模块,Canopenid=1,ch1 速度=1000,ch2 速度=2000
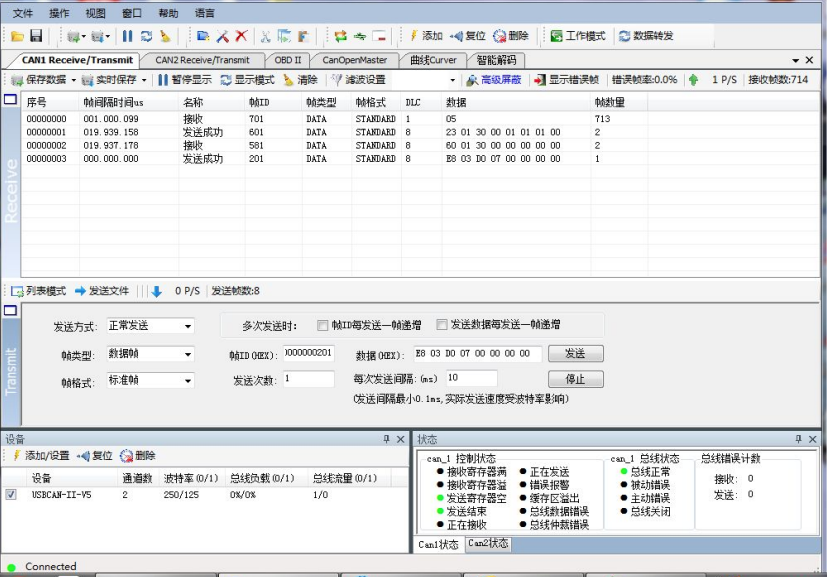
发送 PDO 数据:0x201 E8 03 D0 07 00 00 00 00
如果你停止 CH1 电机,发送 PDO 值为零
比如:0x201 00 00 D0 07 00 00 00 00
下面举例说明:
如图所示:依次发送 01 01 启动指令、电机初始化指令、电机使能指令。
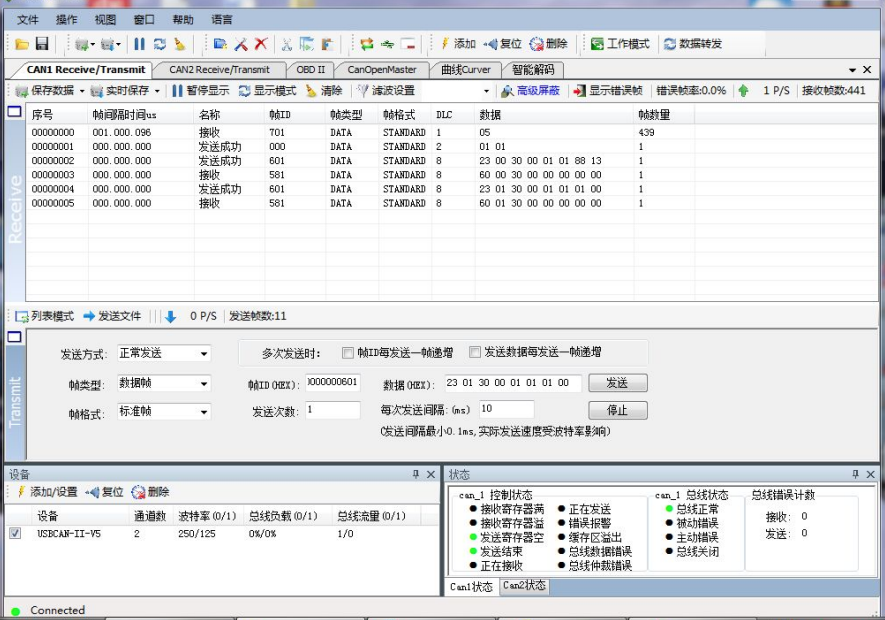
然后发送电机速度控制指令,如图所示,发送的是E8 03 D0 07 00 00 00 00,表示 ch1 电机速度是 1000,ch2 电机速度是 2000,实际电机速度 ch1为100,ch2为200。
3.6 搭载 GC-3654 模
一个 3654 有 4 个通道,一个通道占两个字节,高字节在后,低字节在前。其他36x4 系列产品数据格式同 3654。若搭载多个 3654,则对应关系如下表。
3604:-5V~+5V 对应-32768~+32767
3624:-10V~+10V 对应-32768~+32767
3654:4~20mA 对应 0~65535
3644:0~20mA 对应 0~65535
3664:0~5V 对应 0~65535
3674:0~10V 对应 0~65535
下面举例说明:
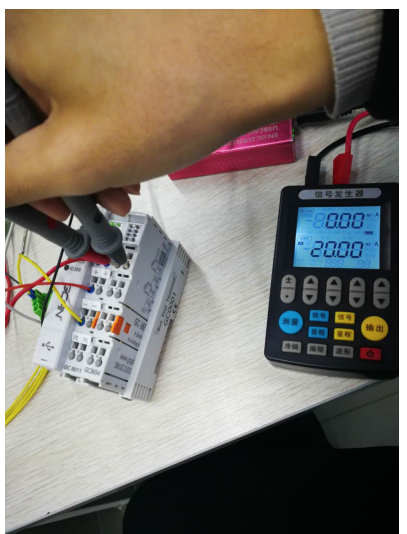
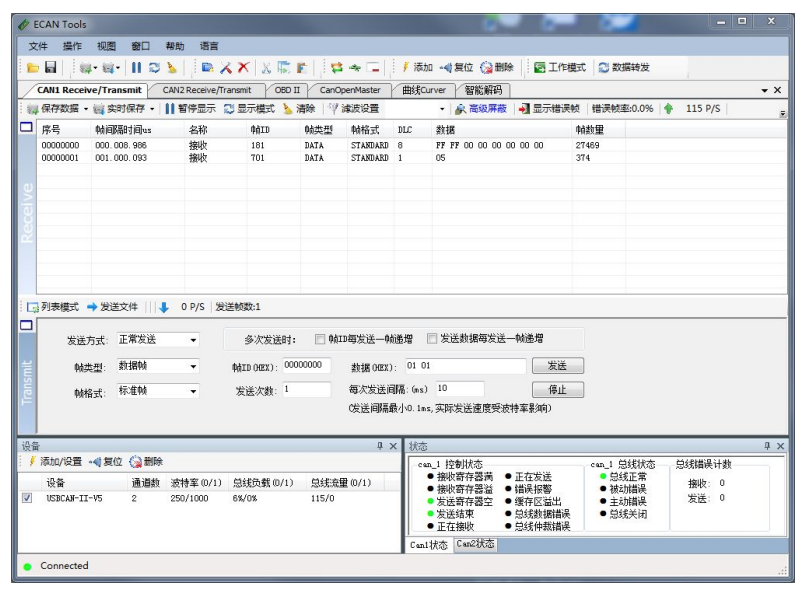
如下图所示,8000 搭载了一个 3654,发送 01 01 启动指令后,会接收到0x181数据。
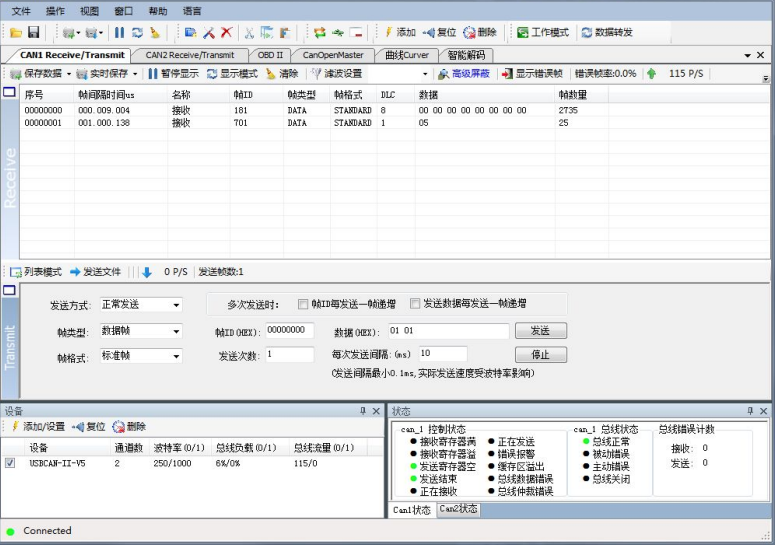
如下图所示,当给第一通道 20mA 输入时,181 数据发生了变化,前两个字节接收数据变为 FF FF,高字节在前,低字节在后。(3654 的 4-20mA 对应0-65532)
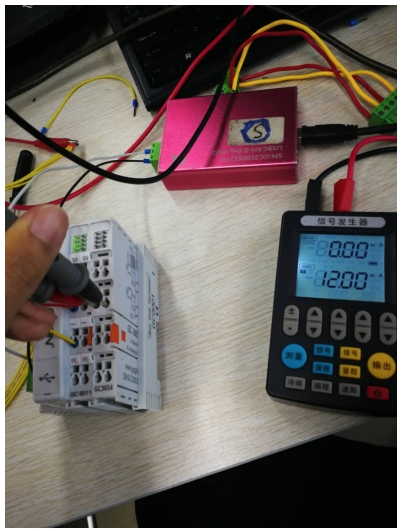
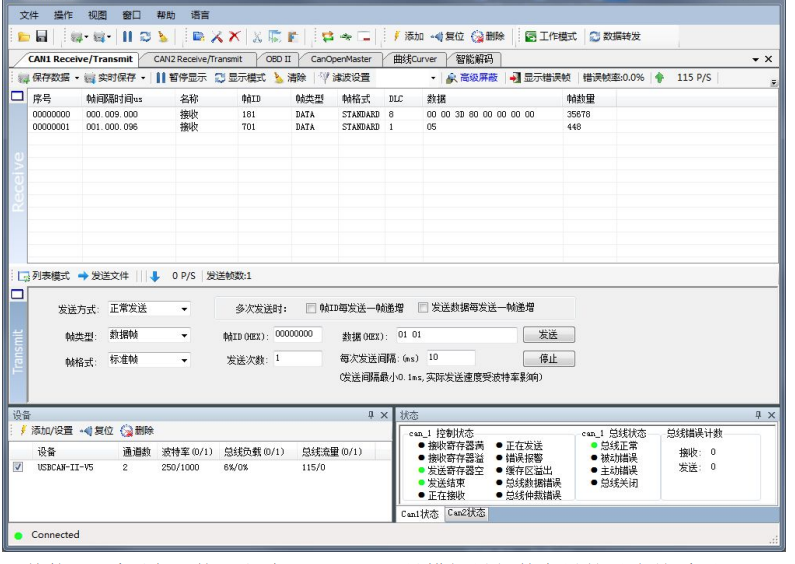
如下图所示,给第二通道 12mA 输入,3,4 字节显示 3D 80,(正常应该是 FF 7F,
但是会有些误差,不影响使用)
其他 36 系列产品使用方法同 3654,只是模拟量与数字量的对应关系不同。
3.7 搭载 GC-4602 模块
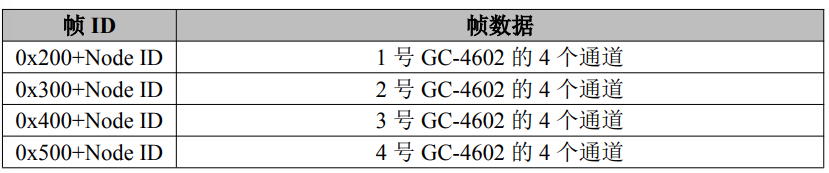
一个 4602 有两个通道,一个通道两个字节,高字节在后,低字节在前。其他 46系列产品数据格式同 4602。若搭载多个 4602,则对应关系如下表。
4602:-5V~+5V 对应-32768~+32767
4622:-10V~+10V 对应-32768~+32767
4642:0~20mA 对应 0~65535
4652:4~20mA 对应 0~65535
4662:0~5V 对应 0~65535
4672:0~10V 对应 0~65535
注:
3.8 搭载 GC-1502 模
一个 1502 有俩个通道,一个通道占 8 个字节,其中计数占 4 个字节,频率占 4个字节,计数在前,频率在后,低字节在前,高字节在后。
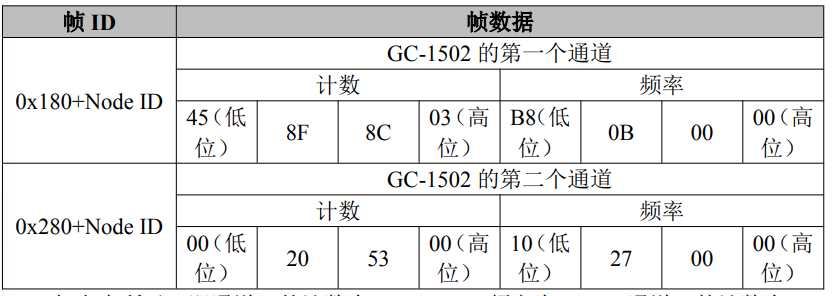
如上表所示,即通道一的计数为 59543365,频率为 3kHz. 通道二的计数为5447680,频率为10kHz。
