

一、接口定义功能及设备状态指示灯
1.接口定义及功能
GCAN-4057模块集成一路 9-30VDC电源接口、1路标准CANopen接口、8路开关量输入接口、8路开关量输出接口。GCAN-4057模块电源接口、8路开关量输入接口位置如图2.2所示,接口定义如表2.2所示。

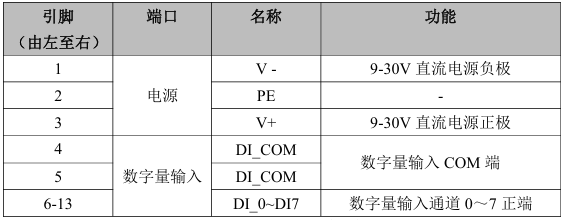
表2.2 电源及8路开关量输入接口定义
GCAN-4057模块CAN-bus通道,由1个4Pin插拔式接线端子引出,可以用于连接1个CAN-bus网络或者CAN-bus接口的设备。GCAN-4057模块CAN-bus接口、8路开关量输出接口位置如图2.3所示,接口定义如表2.3所示。

图2.3 CAN-bus 接口、8路开关量输出接口位置
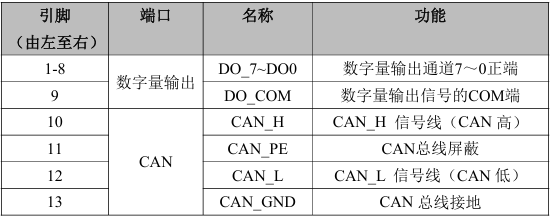
表2.3 CAN-bus 接口、8路开关量输出接口定义
GCAN-4057 模块源型输入、PNP输出接线如图所示:
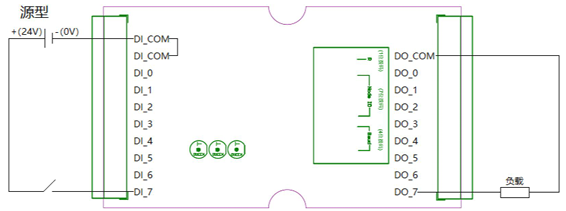
图2.4 GCAN-4057 模块源型输入、PNP输出接线图
GCAN-4057 模块漏型输入、PNP输出接线如图所示:
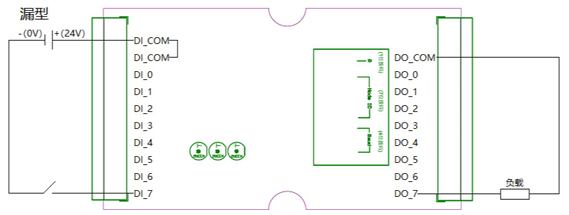
图2.5 GCAN-4057 模块漏型输入、PNP输出接线图
GCAN-4057模块拨码开关如图2.4所示,GCAN-4057模块拨码开关最左侧为复位按键,默认在下方,上电时拨上,再拨下,重新上电后恢复出厂设置。复位按键右侧7位为节点号设置开关。最右侧4位为波特率设置开关。左侧为高位,右侧为低位。

图2.4 GCAN-4057 模块拨码开关
2.系统状态指示灯
GCAN-4057 模块支持工业现场常见的+9~30V DC 直流电源。为保证模块可靠工作,建议使用+12V 或+24V 的 DC 直流稳压电源。
2.1 系统状态指示灯
GCAN-4057模块具有1个PWR指示灯、1个SYS指示灯、1个CAN指示灯来指示设备的运行状态。这3种指示灯的具体指示功能及状态如表3.2所示。
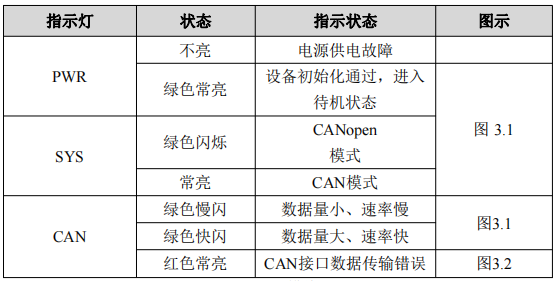
表 3.2 GCAN-4057模块指示灯状态
指示灯立即点亮;

图3.1 GCAN-4057 PWR、SYS和CAN灯状态

图3.2 GCAN-4057 CAN灯状态
二、配置说明
用户可使用模块上方的拨码开关自行设定GCAN-4057模块的参数,以满足实际应用场合的需要。GCAN-4057模块的配置,包括模块的节点号和波特率两部分。
请注意:通过拨码开关改变GCAN-4057模块的参数之后,需要重新对模块上电之后,新的参数才会生效。
1.CAN节点号配置
如图4.1所示,拨码开关的每个位拨向“ON”位置时,该位为“1”,如果拨向“OFF”位置,则该位为“0”。拨码开关的2—8位用于设定模块的节点号(NODEID),第八位为最低位,第二位为最高位,模块的节点号(NODEID)是各位对应的十进制值之和,通过拨码开关设定模块的节点号(NODEID)的有效范围为0~127。
请注意:拨码开关第一位为复位拨码,默认为OFF(下方),上电时拨上,再拨下,重新上电后恢复出厂设置。
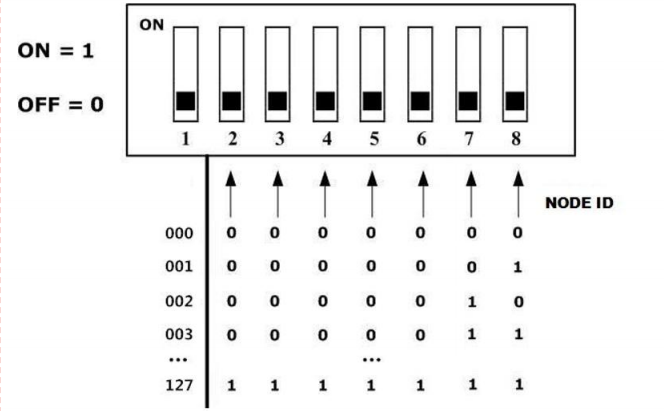
图4.1CAN节点号配置说明
2.CAN波特率配置
右侧拨码开关的1-4位用于设定模块的波特率,第一位为低位,第四位为高位。波特率与开关设置对应值如下表4.2所示。
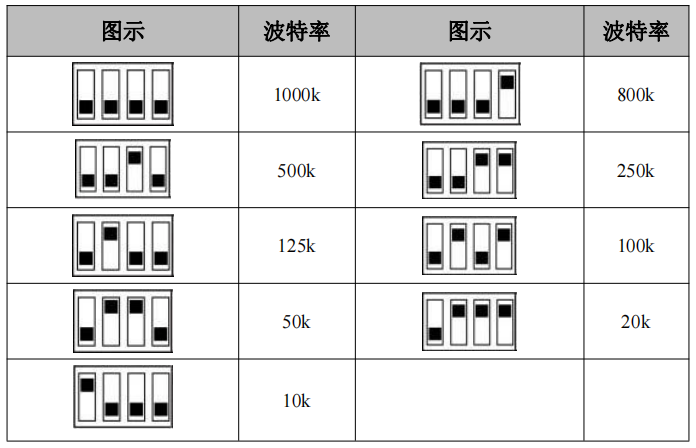
图 4.2 CAN 波特率配置说明
三、快速上手
GCAN-4057模块支持CANopen和CAN两种模式,默认CANopen模式,使用说明如下:
GCAN-4057模块默认上电后切换至CANopen模式的05启动状态,默认模块上电后立即对数字量信号进行采集并可控制(写入)输出。
例如:默认GCAN-4057的NodeID为1(以下节点号均为1),则主站设备可接收到一条节点状态数据,帧ID为0x701,标准帧,数据为0x05,默认心跳时间100ms。。

数据采集:
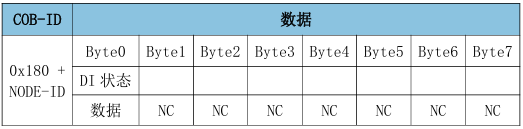
当前状态,TPDO1用于表示数字量DI状态,如图所示,帧ID为0x180+Node ID,默认帧数据第一个字节为数字量输入状态。
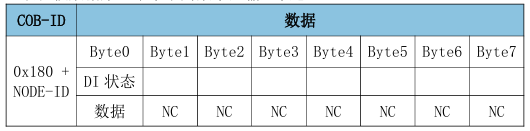
默认第8路在高位,第1路在低位。例如,GCAN-4057模块节点号设为1。此时第1路输入状态为1,其余DI状态均为0。则CAN总线主站一端接收的DI 状态数据为0x01。

此时第8路输入状态为1,其余DI状态均为0。则CAN总线主站一端接收的DI状态数据为0x80。

控制输出:
RPDO1用于表示控制(写入)数字量输出的状态,帧ID为0x200+NodeID,数字量输出默认由一个字节来控制(写入)。
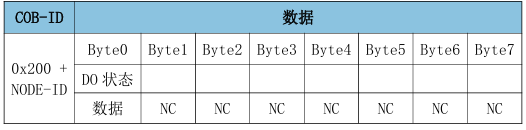
默认第8路在高位,第1路在低位。例如,GCAN-4057模块节点号设为1。若需要设置第4路状态为1,其余DO状态均为0,则CAN总线主站一端发送的帧ID为0x201,帧数据为0x08。

若需要设置第8路状态为1,其余DO状态均为0,则CAN总线主站一端发送的帧ID为0x201,帧数据为0x80。

四、标准CANopen模式
1.节点状态
GCAN-4057模块满足标准CANopenCiA301协议,是标准的CANopen从站设备。GCAN-4057启动后将主动发出一帧数据给主站,帧ID为0x700+NodeID。
例如:默认GCAN-4057的NodeID为1(以下节点号均为1),则主站设备可接收到一条节点状态数据,帧ID为0x701,帧数据为0x7F。

对象字典0x100C,节点守护时间,默认为0,默认不开启超时功能;对象字典0x100D,LifeTimeFactor,默认为3。
0x100C和0x100D通过SDO配置后,主站主动发送命令来询问从站节点的状态(NodeGuarding),节点守护命令帧ID为0x700+NodeID,远程帧。若从站4057收不到主站的节点保护报文,延迟100C(ms)*100D时间后,从站进入Pre-operational模式,并停止所有输出。

2.NMT状态切换
GCAN-4057模块接收由主站发出的操作指令,帧ID为0x000,DLC为2,帧数据第一个字节为命令符,第二个字节为节点号(若为00则控制全部节点)。
例如:GCAN-4057的NodeID为1,命令GCAN-4057为进入操作状态(01),则NMT命令帧ID为0x000,帧数据为0x01,0x01。
主站发送数据0101,GCAN-4057模块进入05启动状态。

3.PDO命令
GCAN-4057模块采用PDO(ProcessDataObject,过程数据对象)对数字量信号进行采集或写入输出。DI、DO每一路的具体位置均可自由配置,详见6.1.3和6.1.4 章节。
其中,TPDO1用于表示数字量DI状态,帧ID为0x180+NodeID,默认帧数据第一个字节为数字量输入状态。
TPDO1:
第8路在高位,第1路在低位。例如,GCAN-4057模块节点号设为1。此时第一路状态为1,其余DI状态均为0。则CAN总线主站一端接收的DI状态数据为0x01。

如需要控制(写入)GCAN-4057模块数字量输出的状态,需接收RPDO1命令(由主站发出的),帧ID为0x200+NodeID,数据长度为1,帧数据第一个字节为需要设置的数字量输出状态。
RPDO1用于表示改变(写入)数字量输出的状态,帧ID为0x200+NodeID,数字量输出默认由一个字节来控制(写入),第8路在高位,第1路在低位。
RPDO1:
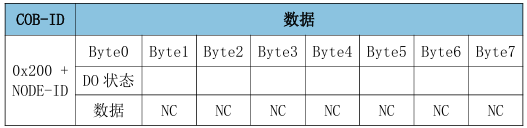
第8路在高位,第1路在低位。例如,GCAN-4057模块节点号设为1。若需要设置DO4状态为1,其余DO状态均为0,则CAN总线主站一端发送的帧ID为0x201,帧数据为0x08。

4.SDO命令
服务数据对象SDO(ServiceDataObjects)主要用来访问节点的对象字典,当前标准CANopen模式也可以直接对GCAN-4057的参数进行读写配置。请参照第6章配置相关参数,配置后重新上电生效。
五、CAN 模式配置及使用
请注意:CAN模式下只有数据收发,无法配置相关参数。若想重新配置参数,请复位进入默认或在标准CANopen模式下重新配置。
1. 配置操作举例
CAN模式操作举例:(以节点号为1举例)默认模式上电后:
模块配置为CAN模式
报文:ID:0x601 数据:2F00240001000000,设置模块为CAN模式。

重新上电后,配置生效。请注意:CAN模式下只有数据收发,无法配置相关参数。若想重新配置参数,请设备复位后进入CANopen模式重新配置。
默认参数使用
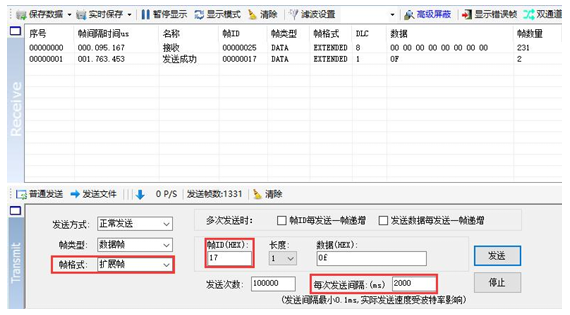
GCAN-4057 模块通过0x2400配置为CAN模式,其他参数为默认值(默认帧数据第一个字节为数字量输入/输出状态,第8路输入/输出在高位,第1路输入/输出在低位),重新上电,CAN模式的数据收发如图所示。CAN模式相关参数请参照第6章配置。
输入帧ID指的是输入DI的ID,默认0x00000025;输出帧ID指的是可通过该ID控制DO的输出,默认为0x00000017,扩展帧有效。数据0F为设置前4路有输出。超时时间默认2S,即2S后GCAN-4057停止输出,若需要持续输出,发送间隔应小于等于2S。
六、GCAN-4057对象字典
请参照手册第26页:GCAN-4057 CANopen接口DIDO数据采集模块用户手册
